Layer 01 · Education
Physical AI Industrial Framework — The Course
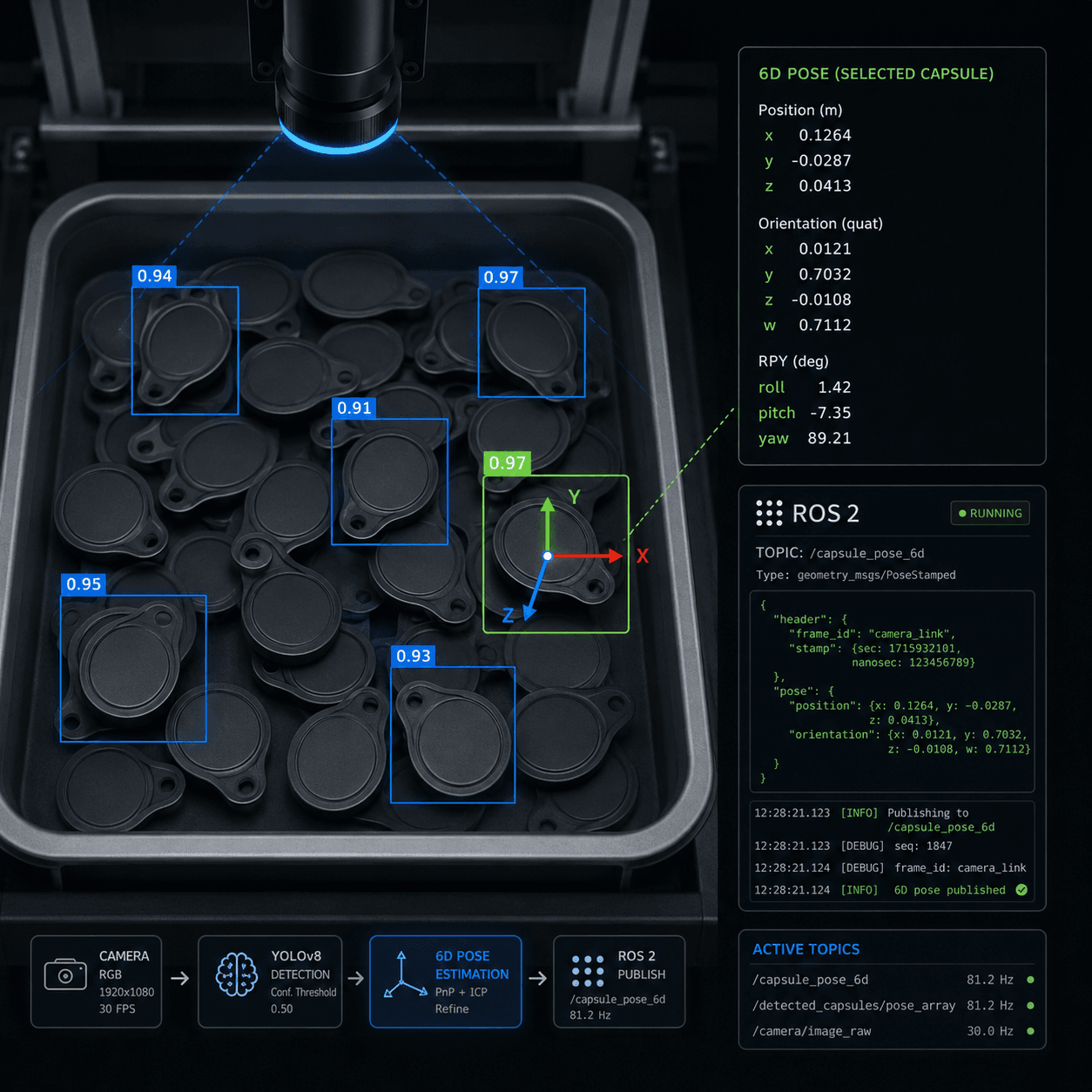
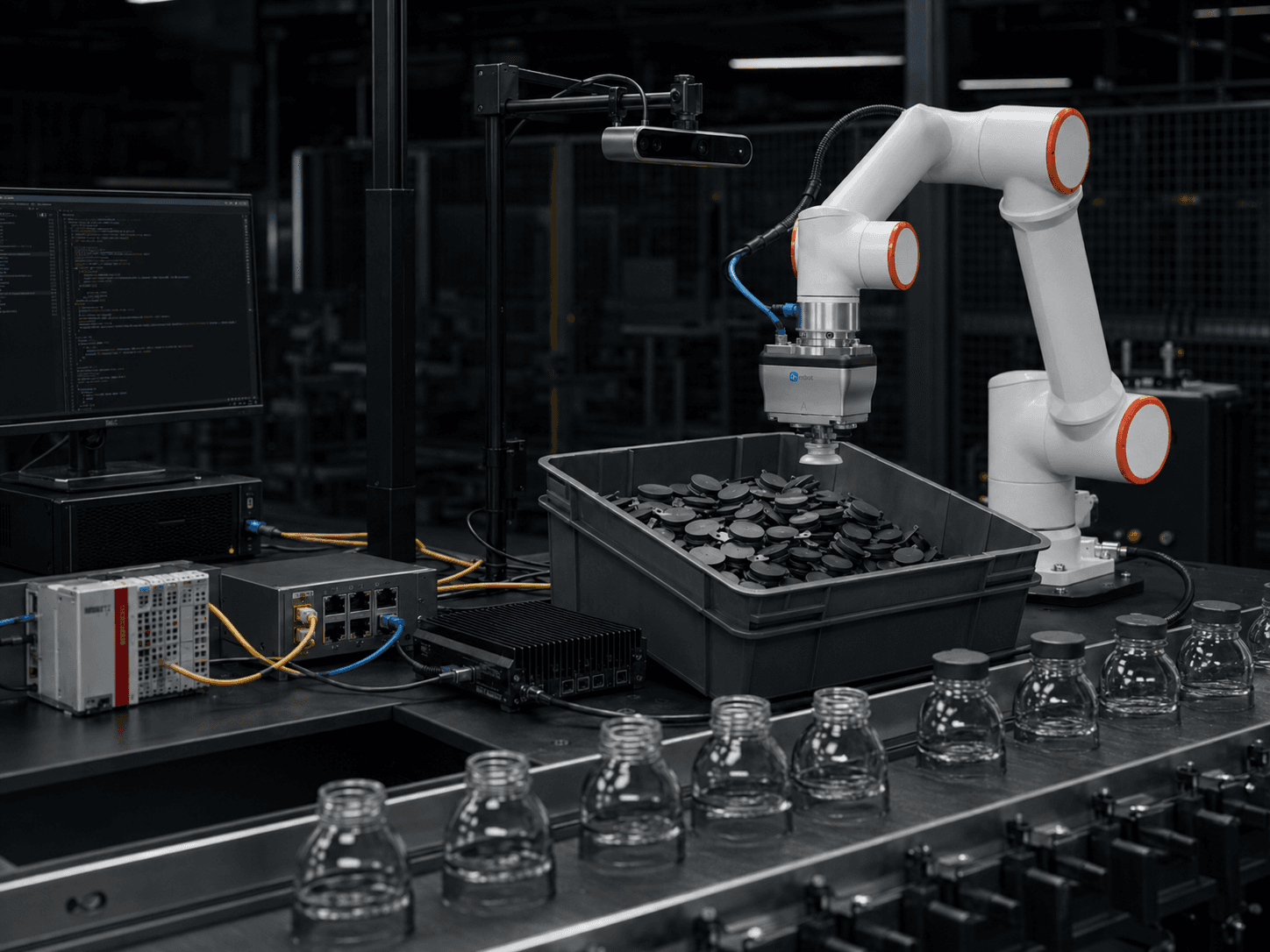
A self-paced 30-day practical course that hands you a reusable Physical AI framework. Video lessons walk you through implementing it end-to-end on a real industrial case study — vision-guided bin picking of bottle capsules — which you can then readapt to your own application.
- Self-paced · 30 days
- Reusable framework you own
- Bin-picking case study (capsules)
- Isaac Sim + Isaac Lab
- ROS2 + MoveIt2 + Behavior Trees
- RGB-D perception (YOLO + PCL + OpenCV)
- Jetson edge deployment
- PLC integration patterns